Building a Mini Quad
Saturday, 15 August 2015(A.K.A. Drone/Quadcopter/Multirotor/ZMR250)
It was Christmas 2014 when it all began, the conception of my Multirotor fascination and subsequent obsession. I’d eyed up a £30 micro quadcopter earlier on in the year but sensibly (or foolishly) avoided it. However it wasn’t long before in the usual last minute Christmas rush I found the quad for £16 from ebuyer. I ordered 3 Hubsan Q4 Nanos for Christmas presents. The fun we had flying these later led us to the larger Hubsan X4 with HD Camera.
Once I’d mastered the toys, it was time to move onto something bigger and better. I decided to avoid the out of the box RTF (Ready to Fly) models such as the Phantom, that all seemed to easy. I wanted to go deeper into the hobby and build my own.
After crawling the Internet I discovered a lot of people talking about the ZMR250. A seemingly decent clone of the way more expensive “Blackout” frame. Shiny Black, Carbon fibre, space to hold all sorts of fancy tech, £13.00? I was sold.
The Build
Components
- ZMR250 Carbon Fibre frame.
- Naze32, later swapped out for Flip32+ which has the Compass and Barometer - running Cleanflight.
- EMAX 12a Simonk ESCs (which don’t actually run Simonk!).
- DYS 1806 brushless Motors.
- 5030/ 45 Gemfan propellors.
- FrSky D4R-II RX (Radio Receiver).
- FrSky Taranis X9D.
FPV
- Boscam TS353 VTX (Video transmitter).
- Sony 600TVL CCD Security Camera.
- Mobius Action Cam.

Working on the Mini Quad.
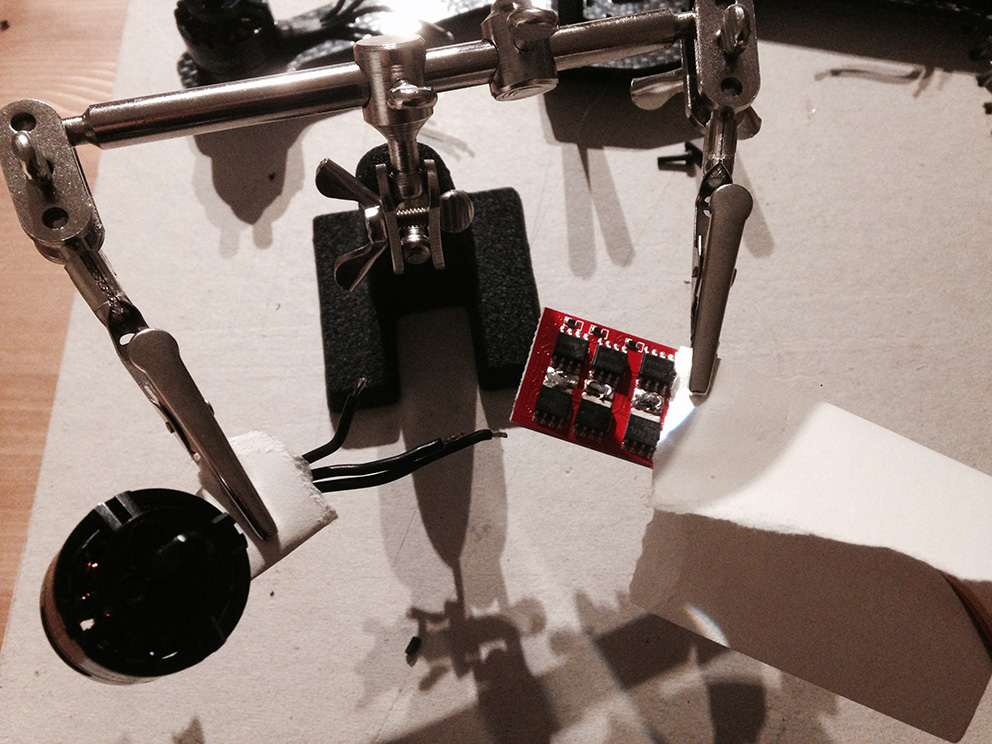
Soldering ESCs. This was tricky as the solder pads were staggered, so all 3 motor wires needed to be just the right length. The weight loss through not using bullet connectors is certainly worth it though.
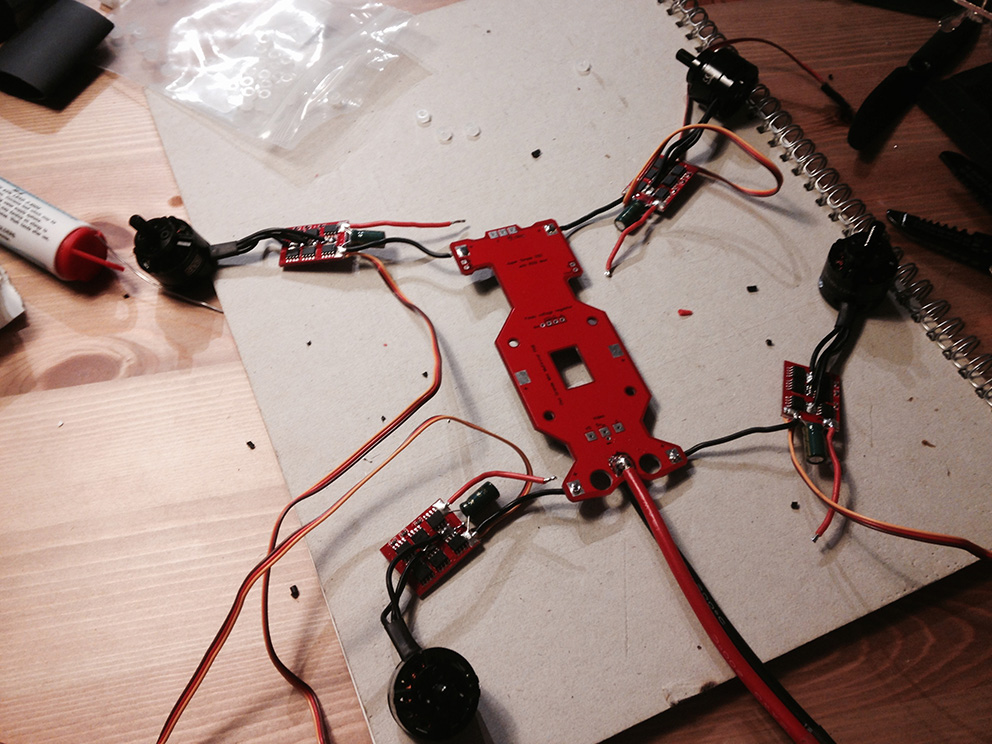
Bringing the circuitry all together via the Simple PDB.

The Taranis X9D was my choice of TX. This shot also included the FPV (First Person View) gear.



Nice Fringe.

Until next time...
Next up:
- Installation of the long awaited Overcraft PDB Batch 4.
- GPS antenna for PH (Position hold), and RTL (Return to Launch).
- Contribute to Cleanflight (waypoints?).
- Build a web app to log flights.